Hangprinter is an open sourced RepRap machine that uses walls and other surfaces as a frame. It literally hangs and prints. It makes a build volume an obsolete concept.
Layer One, creators of Atom3D printer, have released two open source RepRap 3d printer. Proton and Neutron. They are open sourced under Creative Commons licence.
Proton has total volume of 38 cm x 28 cm x 37 cm, assembled weight of 4.25 kg and printing volume of 18 cm x 18 cm x 15 cm.
TRENDi Maker V3 DIY 3d printer follows the tradition of small machines with 3d printed parts. It is a RepRap essentially. It uses metal rods and other vitamins but there are no additional support elements lake lase cut parts other than 3d printed supports.
Project description:
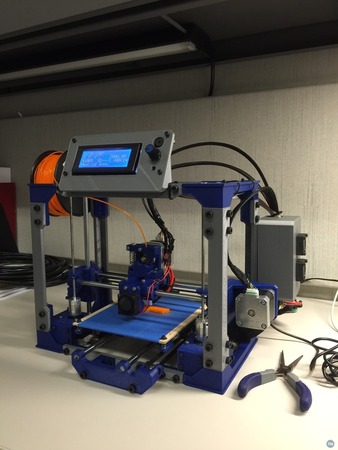
This is my small 3D printer. It is not mini (A little bit smaller, than standard Prusa). No parts for laser cutting. Basic things You need to have in mind, if You want to make it: 6 mm smoth rods(relatively LM6uu bearings), M5 threaded rods for Z(2x 20mm M5 nuts), PC PSU 350W, E3DV5 (reworked) clone, Mega2560+RAMPs 1.4, Nema17 motors and Geeetech 152x152mm heated bed. My build size is XYZ 110x140x90mm. Z can be extended to 100-105 mm. X can be extended to 140 mm, if You want to lose 3 point bed leveling and to rework Y holder for heatbed.
Cliff is in action again!!! Swedish 3d printing guru designed a new small RepRap and he wants YOU to help him name it! Live him a comment under a video with your idea. The no-name RepRap is a interesting looking machine that has many 3d printed structure parts that can be produced on a standard sized printbed.
Dollo is another RepRap with high percentage of 3d printed parts and that can be printed with 1 kg of filament. Since it is modular it could have been expanded and re-arranged. Interesting design but it looks like the development stopped.
Dollo project homepage where you can download the files for it:
Revar Desmera developed a RepRap that goes beyond usual number of 3d printed parts. His model is 73% 3d printed and has greatly reduced number of non-printable parts by using a 3d printed rack and pinion setup.
Snappy in action:
All the files and instructions to build it can be found at:
ToyRAP is a new project which is based on 28BYJ-48 stepper motor making it extremely cheap, it can be built for some 75 euro. It is aimed at education and demonstration purposes.
Project description and technical specifications:
ToyREP is a tiny and inexpensive FFD 3D printer designed mostly as a technology demonstrator or child's toy.
The print volume is 100x100x100mm (125x125x100mm with some upgrades) with a cold bed made of polyacrylate.
Hot end is a E3D clone for 1.75 PLA or ABS filament with 0.4mm noozle.
Using very cheap 28BYJ-48 stepper motors (with Bi-polar hack) in all axis and geared extruder, Arduino Mega 2560 with Ramps 1.4, DRV8825 and modular RepRap construction based on Mendel, Printerbot, Cherry, Prusa i3 and CARP Box ideas.
It is designed to use 12V 40W PSU for LED lights that should fit under bed. Power consumption is currently ca 40W when heating hotend and 15W-20W when printing (Eventually 40W 100x100mm heat bed would rise PSU requirements up to 80W.)
Andreas Desmedt, a 15 year old student from Belgium developed a new RepRap 3d printer: the DreBot (or Dbot). It can be made for some 300 USD. Dbot description and technical details:
The base of the printer is a 3030 aluminium extrusion, everything is mounted on this extrusion, wich means everything is tight and compact, making it easy to carry or put away.
The Z axis is made out off 2 12mm rods with a carriage attached to it using 4 LM12UU bearings. In this carriage, there are 2 8mm rods mounted, wich are for the X axis.
The carriage for the X axis is mounted using 3 LM8UU bearings, two on the bottom and one on the top. For the Y axis, I also use 2 8mm rods. The wooden plate for the heatbed is attached to the rods using 3 LM8UU bearings. Both X and Y axis are driven by NEMA17 motors using GT2 belts.
The Z axis is driven by a M8 threaded rod. The Dbot is controlled by a Ramps 1.4 motherboard, and powered by a 360W LED PSU, wich are both also mounted onto the 3030 aluminium extrusion.
The extruder is a fully self designed extruder, wich is also printable. This is done to keep the costs low. Both the extruder motor and the motor that powers the X axis are located on the opposite site and used as a counterweight for the X axis rods and carriage. The ramps board is located in a casing with a fan, for proper cooling.
The bed itself is a MK3 heatbed. The printers volume is 200(X)x190(Y)x185(Z), wich is almost the whole heatbed capacity. I invented my own heatbed nut mounts, so you only have to turn the screw to level the bed and don't think about the nuts.
Kamaq is a control software that is completely unfamiliar to me. Does anyone have any experiences with it? There are no reviews to be found ...
Kamaq features:
Web interface with real-time monitoring and feedback via websockets.
Temperature plots for heaters
Direct motor control panel
Nifty print-speed scale slider to adjust printing speed in real-time
Real-time plot of current layer movements in 2D
Linux-based RepRap firmware written in Python, with a web-interface in HTML5/JavaScript and websockets. It controls up to 4 stepper motors (axes) via standard USB audio device, end-switches and heaters via GPIO and hw-mon.
Project description:
Kamaq is a 3D-printer (FDM) controller software running on an embedded Linux system. It is capable of controlling a RepRap-style 3D printer, but with different electronics. Stepper motor control is done using a 8-channel (7.1) USB audio device and some class-D audio amplifiers. Endstop switches are monitored via GPIO inputs (interrupt-capable) and temperature control for extruder and heated bed via standard hwmon-compatible ADC's and GPIO-outputs for heater control. The software has a web interface for machine control and monitoring.
MapleMaker Mini v2 is a 3d printer that has fully 3d printable frame and main components. It is an advanced open sourced DIY RepRap that can self-replicate to much higher percentage. Very interesting! I wonder how sturdy and rigid it is?
Project description:
The mapleMaker Mini introduces you to the world of additive manufacturing and 3D printing. With your own 3D printer, your concepts and design ideas can be translated from computer drawings to physical objects in short period of time.
The aim of this kit was to reduce costs and create an accessible, hackable, upgradeable, and ultimately, user customizable 3D Printer. We believe that a 3D printer should evolve with it’s users needs and knowledge, and become a platform for any number of future upgrades and additions without the need for costly re-works or additional components.
MapleMaker Mini V2 tech specs:
large 8" x 6" x 6" build volume
All metal hot end (e3d Lite6)
Completely 3D Printed frame and all major components
Simplified frame construction
Simplified printed parts components, all printable in 36 hours or less
Here is a dual extruder solution from 3D Proto where a non-printing extruder is parked outside the print area to prevent oozing which gives better print quality. When a idle extruder is parked outside print area it also gives higher speeds and movement precision to working extruder. It also prevents possible scratching of one extruder on the printed object. Very interesting solution. There are some possible limitations on x-axis due to the width of assembly but it is maybe a minor inconvenience.
Project homepage where more information will be published (with build instructions hopefully):
Here is a new RepRap 3d printer project: the Funbot i1 developed by Cliff Mellangård from Reprap österlen in Sweden. Funbot is still in development phase, but it looks like nice working machine. The project goal is to make simple, cheap and easy to make DIY 3d printer. One of the key advantages of the Funbot design is that it uses 10 mm chromed copper water pipes that are uses commonly for plumbing and can be cheaply found at any hardware store.
Funbot print volume is x = 155mm y = 170mm z = 120mm.
As I'm in constant communication with Cliff who is making new updates on a frequent basis, I'll report on new developments as they are published.
All the details, files for making your version and detailed video construction guide can be found at:
Here is video of Funbot i1 in action showing the print quality:
Update (13.1.2015.): Some new upgrades on the Funbot (Cliff wanted me to add: x axis is 165 and y axis is still 170 but sadly so is the z axis only 115 mm now):
Update (28.1.2015.):
Here is a very useful video tutorial from Funbot project about common problems with RAMPS 1.4 and a how-to guide for beginners.
Update (7.2.2015.):
Cliff is continuing to improve his design (print volume is now 165 on x and 170 on y and 120 on z) and released a new detailed construction guide videos (you can find all assembly videos on his channel):
Here is user news flash with the extruder mount simplification:
Funbot community is growing and first makes were posted on Thingiverse:
Here is a NEW update! Cliff is a hard worker and very frequent updater :-) This update includes simplified frame calibration and option to rotate the extruder 90 degrees that make it more solid when feeding tight rolled rolls of PLA filament.
Update (16.2.2015.):
Here is new update from Cliff of Funbot, he made 3d printable DIY bushings...
Update (21.2.2015.):
Thingiverse user anntho madea more "steampunk" version of the Funbot:
Here is video showing the design progress and evolution of Funbot project. It is a video with music background with no narration, but if you interested in design and development process of an open source 3d printer you will notice the iterative process.
Update (23.2.2015.):
MadMike8 from USA made a Funbot version with bronze bushings and bowden extruder:
Sli3DR (pronounced Slider) is a new DIY open source 3d printer developed by famous RichRap. It has unique moment mechanics configuration that uses Spectra line.
Sli3DR has excellent print results
Here is a diagram of "unnamed" mechanical movement that is used on this machine with Spectra line which originates from old pen plotter machine:
You can find out more about this mechanism on RichRap's blog.
Update: one of the commentators claims it that the mechanism is similar to the movement of Stratasys Fortus machines. Since I'm not familiar with them I can not confirm it ... hopefully this mechanism will be identified and it's origins clarified ...
Four university students (Aaron, Ananda, Matt & Michael) created an upgrade kit and guide for RepRapPro Huxley model. The upgrade includes: laser cut frame is in 6mm MDF, z axis bracket, fan upgrades and maintenance guide.
They also summarized the maintenance needed for Huxley model:
Daily
Use acetone based cleaning solution (nail polish remover will work) to wipe the bed, ensure it is not heated.
Ensure rear fans are clear of cable obstruction.
When feeding filament ensure it has a pointed end, this will help its feeding into the hot-end and extruder.
Ensure the y axis linear rods are in place in the supports.
Ensure that the nut holding the x axis idler is finger tight.
Run the printer fans for no less than 3 minutes before print to ensure smooth operation.
Weekly
All the daily checks plus:
Ensure all the nuts are tight (there are 48 of them).
Check that all 6 bearings are in place.
Monthly
All the Daily and Weekly checks plus:
Cleaning the nozzle: Raise the z axis 50mm from home and the hot-end to 200 through 'Pronterface'. Clean the nozzle of any excess material using a wooden spatula or knife **CAUTION** THIS MUST BE DONE WITH EXTREME CAUTION, the hot-end is at up to 250 degrees C!
Check belt tension on x and y axis. (refer to assembly instructions)
Check that all five steppers are firmly attached to the frame/supports.
Tighten the U brackets connecting the z axis motors to the threaded rods.
Check end stops for wear.
Grease linear rods x6 with WD-40 or similar lubricant.
The electric connectors and screws should be checked for tightness.
Neil Jansen is working on a toolhead exchange system that will enable you to quickly replace different tools on your 3d printer.
A small microprocessor like the ATTiny45 on a small circuit board is planned, for each tool. The hotend mosfet and thermistor circuit will be part of this board, rather than the RAMPS/Sanguinololu/Melzi, etc, and will communicate to it via serial over IRDA module (one on the ATC head / end-effector, and one on the tool). Power will be delivered to the board via pogo pins or via gold-plated contacts near the magnets.